
SMART - PRO Auto Align feature applies when lifting cranes. The camera sensor automatically locates the center of the hook and moves the crane in line with the hook. And then you can raise the hook to minimize the sway.

Outstanding sway Control & Ensure safe working environment
SMART-PRO for Auto-Aline
Controlling of the Crane Swing and Snag with Auto Aline Function
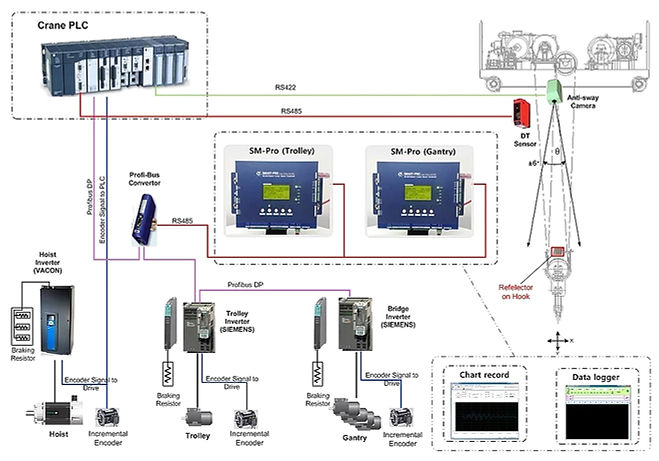
System Configuration
Calculate the offset angle and offset distance from the center of the hook by detecting the reflecting panel installed on the upper hook by the camera installed on the bottom of the trolley.
Prevent the sway by reflecting the calculated offset distance on the trolley and the movement speed control. Prevent the horizontal movement of the load caused by the misarrangement of trolley and hook from the ground.
Video
The following QR code is the actual video of the KTS-Aline Automatic Align function in the field.

Controlling Crane sway and snag
ANTI SNAG CONTROL WITH SENSOR

SMART-GO for snag control
Outstanding sway Prevention & Ensure safe working environment
SMART-GO for snag has received laser sensor information in real time. And If the crane hook is not the center of gravity when the crane hook to rise, it would be swag. then it can cause the accident. So if crane Hook is leaving the crane center, Immediately stop working and safety of workers.
The distance values detected by the sensor are communicated by RS485 communication to the controller and are connected to the control panel and the hoist inverter to determine whether or not to generate the presence of SNAG.
System configuration

Operating principle
The optical sensor is installed on an upper trolley that detects the position of the reflection plate. It determines the alignment of the trolley position and the hook by this process if not read the distance value then automatically stop to rise up hook then precents a snag (the phenomenon of displacement load)

Controlling Crane sway and snag
ANTI SNAG CONTROL WITH SENSOR
+ ANTI SWAY OPEN LOOP CONTROL
SMART-GO for Open Loop
SMART-GO for Open Loop has received laser sensor information in real time. And If the crane hook is not the center of gravity when the crane hook to rise, it would be swag. then it can cause the accident.
So if crane Hook is leaving the crane center, Immediately stop working and safety of workers.
Also, using the distance information from the laser sensor, Calculates the information value and controls the SWAY.

System configuration
The distance values detected by the sensor are communicated by RS485 communication to the controller and are connected to the control panel and the hoist inverter to determine whether or not to generate the presence of SNAG. In addition, the crane motors are controlled by crane driving to minimize the sway.

Operating principle
When a hook rises from the ground, If the position of the trolley differs from the position of the load, it automatically detects the movement of the load. In addition, depending on the height of the crane, the motor controls the motor accordingly to minimize the sway.
Controlling Crane sway and snag
ANTI SNAG CONTROL WITH SENSOR

SMART-GO for sway control
SMART-PRO for sway is given real-time camera information.
When driving, use the coordinate value of the hook to calculate the angle of sway automatically, and to control the sway length of the hoists and the sway according to the riding distance. Minimize extreme vibration during operation and improve productivity and prevent industrial accidents.
System configuration
Calculate the offset angle and offset distance from the center of the hook by detecting the reflecting panel installed on the upper hook by the camera installed on the bottom of the trolley.
Prevent the sway by reflecting the calculated offset distance on the trolley and the movement speed control.

A. Give permission to the optimal speed order to minimize the sway at a given condition.
B. Using the angle data collected by the real-time camera, calculate the position of the hook and trace-control about it.
Operating principle
